











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO  uBio
uBio 
 Permalink
Permalink
La cirugía laparoscópica ha sido uno de los grandes adelantos de la medicina moderna, ofreciendo grandes beneficios a los pacientes; pero a su vez exigiendo un mayor entrenamiento por parte de los cirujanos. La cirugía laparoscópica como la conocemos hoy día, no es sino el resultado de los esfuerzos repetidos, durante muchas generaciones, de cirujanos visionarios que querían ofrecer opciones quirúrgicas, sin causar el daño involuntario que se genera al abrir la pared abdominal. (1,2)
Esta tecnología presenta algunas dificultades técnicas como lo son: la pérdida de la percepción de profundidad producto de la visión en dos dimensiones, disminución en el rango de movimientos de los instrumentos, disminución de la sensación táctil y la disparidad entre la retroalimentación visual y propioceptiva que se produce debido a que los movimientos de la mano en una dirección llevan a un resultado contrario en el extremo opuesto del instrumento, conocido como efecto fulcrum. (3-5)
Múltiples técnicas actuales en cirugía mínimamente invasiva (CMI) requieren de largas curvas de aprendizaje, relacionadas no solo con el abordaje, sino con el uso de nuevos dispositivos e instrumental. (6,7) Esta complejidad de las nuevas técnicas quirúrgicas, ha llevado a cambios en la enseñanza de la cirugía actual.
Modelos de enseñanza
El modelo tradicional de enseñanza de la cirugía propuesto por el Dr. William Halsted en 1892, basado en el entrenamiento en ambientes reales, bajo la supervisión de tutores y resumido en la frase “ve uno, realiza uno y enseña uno” debe quedar atrás. (8-10)
A pesar del compromiso de la mayoría de los médicos y cirujanos en alcanzar el más alto estándar, el error médico ocurre. En el año 1999 el reporte del Instituto de Medicina de la Academia Nacional de Ciencias de los Estados Unidos, titulado “Errar es de Humanos” llamó la atención sobre aspectos relacionados con la seguridad del paciente. De acuerdo al documento, entre 44.000 y 98.000 muertes por año podrían atribuirse al error médico. (11)
Durante años se ha insistido en que el entrenamiento de la cirugía laparoscópica debe llevarse a cabo en laboratorios diseñados para tal fin y no directamente sobre el paciente. (8,12,13)
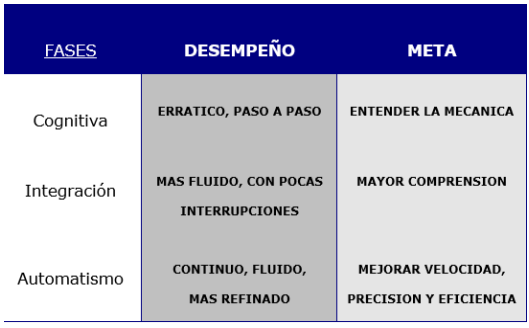
Basados en el modelo de adquisición de habilidades psicomotoras descrito por Fitts y Posner (Figura 1), (14) queda claro que la primera y segunda fase deben superarse en el laboratorio y no en el quirófano. El cirujano experto centra su atención en el componente cognitivo del procedimiento, como, por ejemplo, el reconocimiento de la anatomía y planificación de los siguientes pasos de la cirugía.
Gallagher et al (15) insisten en la necesidad de superar dificultadas relacionadas con habilidades psicomotrices, percepción espacial y de profundidad, fuera de la sala de operaciones, púes de lo contrario se altera la capacidad de concentración del individuo (Figura 2).
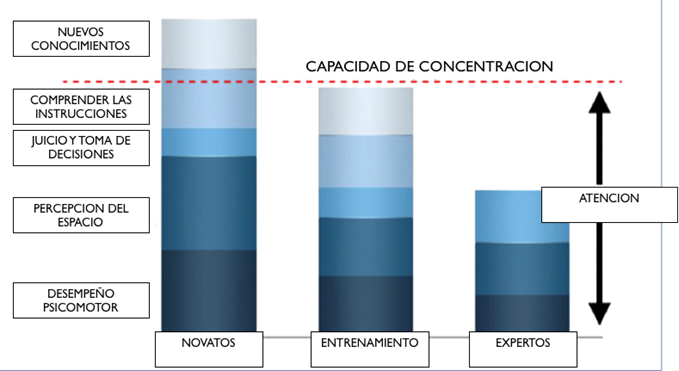
Tomado de: Gallagher et al. Ann Surg 2005; 241(2):364-72
Figura 2: Capacidad de concentración y tareas a cumplir durante la cirugía.
Papel de la simulación en el entrenamiento
La simulación consiste en recrear una actividad peligrosa en un ambiente seguro y libre de riesgos. Un simulador es un dispositivo, modelo o conjunto de condiciones, usado para entrenar individuos mediante la imitación de una situación que enfrentará en la vida real. (16)
El separar la práctica, del desempeño en ambientes reales, ha demostrado su invaluable beneficio en otros campos como los deportes, la música y la aviación. (16)
El uso de simuladores en cirugía se remonta a muchos años atrás, sin embargo, no eran comúnmente utilizados. Ambroise Paré, considerado como uno de los padres de la cirugía, durante el siglo XVI, llevaba cadáveres a su casa para la práctica de nuevas técnicas quirúrgicas. Trabajando en tejidos vivos o modelos inanimados los cirujanos han desarrollado procedimientos quirúrgicos novedosos sin sacrificar la seguridad de los pacientes. (17) Numerosas investigaciones han mostrado que las habilidades adquiridas mediante la formación con simulación se trasladan de manera efectiva al entorno real. (18-21)
Los simuladores actuales en medicina comprenden un amplio espectro de herramientas y métodos de costo variable. Los modelos inanimados son los de menor costo y mayor disponibilidad, se centran en superar las dificultades iniciales de la CMI, para lo cual no se requiere de gran similitud con la realidad. El mejor ejemplo de este tipo de simuladores y su utilidad como herramienta de entrenamiento y evaluación lo constituye la incorporación del Mcgill inanimate system for training and evaluation of laparoscopic skills (MISTELS), al curso de entrenamiento Fundamentos de Cirugía Laparoscópica (FLS). (22,23)
Convencidos de la gran utilidad de los modelos inanimados los autores han descrito y validado modelos de entrenamiento en apendicectomía laparoscópica (Figura 3A), (24,25) modelos de entrenamiento para la exploración laparoscópica de la vía biliar (Figura 3B); (26,27) el impacto de este último modelo en los resultados de la cirugía fue reportado en el año 2011, así mismo, se describió su incorporación al entrenamiento en cirugía robótica asistida con el Sistema DaVinci®. (28,29)
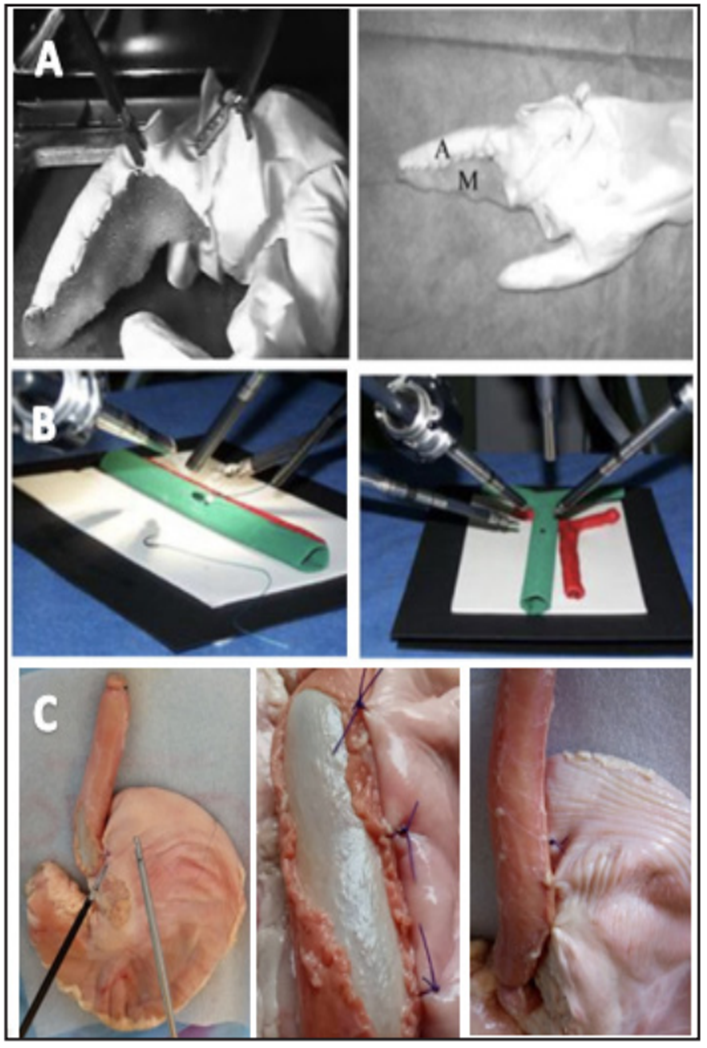
Figura 3: A. Modelo inanimado para la práctica de apendicectomía laparoscópica (24) B. modelos de entrenamiento para la exploración laparoscópica de la vía biliar (29) C. Modelo de esófago-estómago porcino para la realización de Cardiomitomía de Heller. (31)
Los modelos animales o cadáveres permiten la práctica de procedimientos completos, obteniendo una óptima retroalimentación propioceptiva al trabajar con tejidos reales, así como el control adecuado de la hemostasia en los modelos animales. Sin embargo, son modelos costosos, que requieren de ambientes especializados y cumplir con regulaciones legales. (8,17) El cerdo es el modelo animal utilizado con mayor frecuencia, pero el conejo (Oryctolagus cuniculus) es de menor costo y puede ser de utilidad para algunos procedimientos específicos, como apendicectomía y autoaumento vesical, como lo reportamos en el año 2008. (30) En un intento por aprovechar las ventajas del trabajo con tejidos reales y disminuir los costos, se han descrito modelos ex vivo, como el uso del complejo hepatobiliar del cerdo para la práctica de colecistectomía a través de un solo puerto, el pollo para la práctica de la pieloplastía laparoscópica y el esófago-estómago porcino para la realización de Cardiomitomía de Heller (Figura 3C). (31-33)
Los simuladores virtuales son una excelente opción, permitiendo recrear ambientes realistas con un gran detalle anatómico. Opciones como VR-Mist®, LapMentor®, LapSim®, proporcionan la opción de realizar tareas básicas y procedimientos completos; con la ventaja de proporcionar retroalimentación automática. (34-36) En Venezuela ingenieros de la empresa Ludopia Inc, asesorados por los autores desarrollaron la aplicación Quiro® que permite una excelente familiarización con el uso de la óptica laparoscópica y la navegación dentro de la cavidad abdominal. (37)
Por último, la práctica de procedimientos específicos para cada paciente, mediante la reproducción de modelos virtuales o la impresión de modelos tridimensionales (3D), se convertirá en un futuro cercano en un excelente ejercicio previo al acto quirúrgico, hacer la misma operación varias veces antes de realizar el procedimiento en el paciente se ha convertido en un campo apasionante de la simulación. (38-40)
Teorías de aprendizaje en el adulto
El aprendizaje será más efectivo en cuanto se ajuste a las teorías del aprendizaje del adulto, no basta con realizar horas y horas de simulación, si estas no son adecuadamente planificadas y dirigidas.
Antiguas teorías veían al estudiante como un receptor pasivo, en el cual los docentes vertían todo el conocimiento, el foco se centraba en el tema y no en el estudiante. (41) Las teorías más recientes toman en cuenta la relación enseñar - aprender en un contexto mucho más amplio, el aprendiz es una mente comprometida que se forma tanto por acciones con el ambiente como por factores situacionales. (41) Malcom Knowles (42,43) ha desarrollado un concepto llamado “andragogía”, definido como “el arte y ciencia de ayudar a aprender al adulto”, esta teoría establece que el adulto no es pasivo, se trata de un ente activo. (42,43)
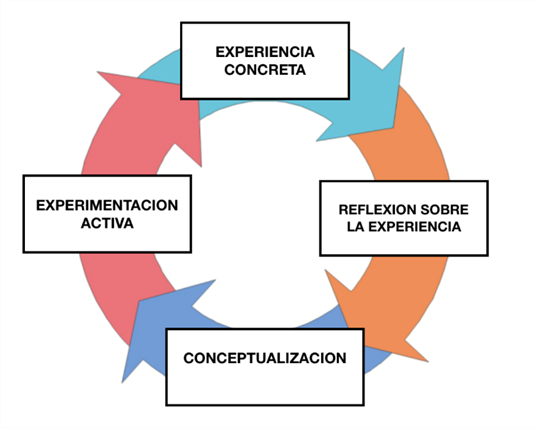
Por otro lado, de acuerdo a la teoría del aprendizaje basado en experiencia, desarrollada por Kolb, (41) el proceso de aprendizaje ocurre en un ciclo (Figura 4) finalizando en la experimentación activa, que permitirá poner en práctica lo aprendido.
Knowles (42,43) y Kolb (41) describen que entrenar al cirujano mediante el uso de simulación, le sitúa en un ambiente favorable donde el cirujano toma gran responsabilidad en el proceso de aprendizaje, puede aprender a su propio ritmo, cuenta con elementos para evaluar el progreso y obtiene retroalimentación.
De acuerdo a Ericsson (44), el mejor camino para alcanzar el más alto nivel de habilidades se trata de prácticas dirigidas a necesidades específicas para cada individuo, identificadas por un mentor; así como la retroalimentación inmediata. (44) Así mismo Gaugeret al, (45) Korndorfferet al, (20) han demostrado que la capacidad de los cirujanos en alcanzar la competencia mejora considerablemente al establecer un sistema de retroalimentación y al establecer metas, lo cual pudiera incluso conducir a una disminución en la curva de aprendizaje. (46)
La incorporación de un sistema objetivo de evaluación durante el entrenamiento es una necesidad para establecer un sistema de enseñanza realmente efectivo.
Evaluación objetiva de desempeño en cirugía laparoscópica
El tradicional método de evaluación de destrezas, donde el tutor evalúa de acuerdo a su apreciación es un método muy subjetivo, que tiende a sobrevalorar las destrezas.
La creación de herramientas de evaluación objetivas no ha sido tarea sencilla. Dentro de los parámetros utilizados, el tiempo en el cual se completa determinada tarea no siempre es reflejo de una adecuada práctica quirúrgica, estudios han demostrado que cuando el cirujano trata de terminar la tarea en menor tiempo, lleva a cabo un mayor número de movimientos por minuto o incluso movimientos bruscos. (47,48) El principal aspecto de la evaluación debe centrarse en cómo se completa la tarea y no en lo rápido que se realiza.
Szalayet al. (49) evidencian que la evaluación de la calidad del resultado final del procedimiento usando parámetros como calidad del anudado o anastomosis, tiene correlación con las destrezas del cirujano; concluyendo que puede ser una herramienta útil, pero la confiabilidad interobservador no es tan alta como la deseada por lo que debe hacerse en conjunto con métodos más objetivos.
El uso de escalas de evaluación incluyendo parámetros relacionados con el dominio del método y penalidades por errores cometidos durante el procedimiento pudiera contribuir a una evaluación más fidedigna del desempeño. El FLS utiliza dos parámetros de evaluación, tiempo y número de errores cometidos; la confiabilidad y validez de este método ha sido demostrada en múltiples estudios. (50-52)
Durante la evaluación OSATS (Objetive Structured Assessment of technical Skills) el cirujano realiza múltiples tareas, siendo evaluado mediante listas de chequeos específicas para cada tarea y mediante una escala global de desempeño. (8,53)
La evaluación basada en procedimientos (PBA), y la escala global la observación directa de habilidades de procedimiento (DOPS), han sido descritas en el Reino Unido como parte del sistema de evaluación del programa curricular quirúrgico intercolegial (ISCP). DOPS ha demostrado ser confiable y ha sido validado como una herramienta útil en la evaluación del desempeño de cirujanos durante la realización de colecistectomía laparoscópica. (54,55)
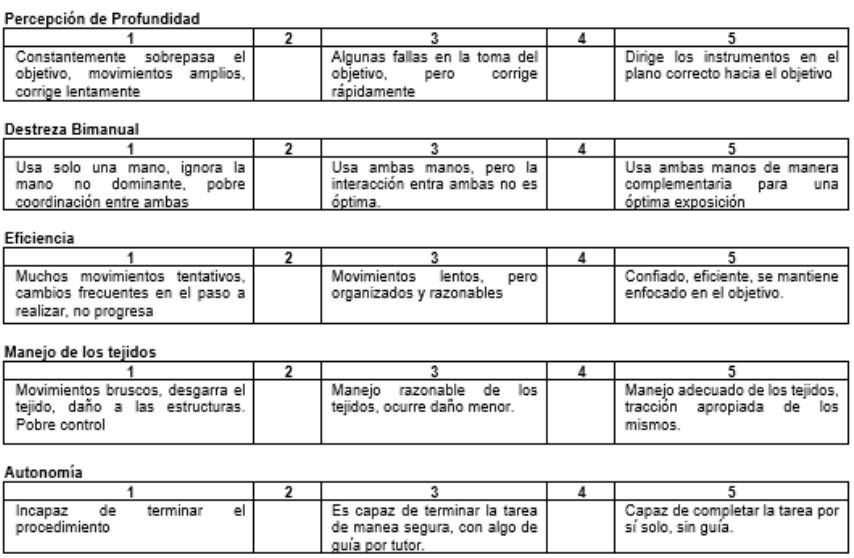
La escala GOALS (Global Evaluative Assessment of Laparoscopic Skills), desarrollada por Vassiliou et al. (56) consiste en un método de evaluación basado en el desempeño del cirujano durante la realización de un procedimiento laparoscópico de cualquier complejidad. (Figura 5). (57-59) Escala utilizada por los autores para la evaluación de la curva de aprendizaje necesaria para adquirir las destrezas para realizar sutura y anudado laparoscópico. (60)
Algunas modificaciones de la escala GOALS se han descrito para evaluación de procedimientos específicos como el caso de GOALS-IH para la cura operatoria de hernia incisional. (61) De igual manera surge la escala GEARS (Global Evaluative Assessment of Robotic Skills) para evaluación de desempeño en cirugía robótica, validada en el año 2015 en el programa de cirugía robótica del Hospital Universitario de Caracas. (62)
En la búsqueda de alternativas de mayor objetividad, la tendencia mundial durante los últimos años ha sido dirigir la atención hacia el estudio de patrones de movimientos al momento de realizar determinada tarea o procedimiento.
Análisis del movimiento para evaluación del desempeño
Se ha demostrado que las destrezas psicomotoras se pueden determinar mediante el análisis del movimiento de los instrumentos, siendo este un eficiente y objetivo método de evaluación; (63-67) esto se puede hacer con distintos sistemas de rastreo de posiciones como dispositivos electromagnéticos, mecánicos, acústicos y ópticos. (68)
Según la revisión de Chmarraet al, (69) al menos dieciséis equipos se han desarrollado a nivel mundial con este fin durante la última década. Dattaet al, (70) desarrollaron un instrumento de detección de movimientos conocido como ICSAD (Imperial College Surgical Assesment Device). El trazado producto del cambio de posición de los instrumentos se ha llamado “firma del movimiento” y permite establecer una clara diferencia entre individuos con diferente nivel de experiencia.
Una aproximación similar al tema fue realizada por Rosen et al (65) con el diseño de una unidad electromecánica conocida como el “Dragón Azul”, que permite medir los movimientos realizados por las manos, y su sucesor “Dragón Rojo”, dispositivo que permite además medir la fuerza que es aplicada en los instrumentos. (65,71)
Otros dispositivos mecánicos utilizan poleas a nivel del puerto de trabajo, que permiten registrar y grabar el movimiento del instrumento en varios ejes, ejemplos de estos son el Laparoscopic Surgical Workstation y Virtual Laparoscopic Interface(Immersion Inc.), así como, el Advanced Dundee Endoscopic Psychomotor Tester (ADEPT), todos estos son instrumentos relativamente sencillos cuando se comparan con otros sistemas de rastreo, pero con el inconveniente que no se pueden aplicar en cirugías in vivo. (69)
Sokollik (72), demostró la utilidad de un dispositivo basado en ultrasonido (Zebris Medical Inc), en la evaluación de habilidades en CMI y su capacidad para distinguir entre individuos novatos y expertos.
Cristancho (73), ha descrito su experiencia con el uso de sistemas electromagnéticos, y enfatiza la importancia del estudio del movimiento como un parámetro objetivo y práctico a la hora de determinar la competencia. Así mismo, Yamaguchi (74) propone el uso de sensores en la punta del instrumento y recalca la importancia de la evaluación de habilidades psicomotoras mediante detección de movimientos a la hora de realizar tareas complejas como suturas y anudado intracorpóreo.
El ProMIS® (Haptica Inc.) es un simulador híbrido con escenarios de realidad aumentada, con un sistema de evaluación que se basa en el estudio de la trayectoria de instrumentos, evaluando parámetros como tiempo, longitud de la trayectoria del instrumento y sutileza del movimiento. El sistema se encuentra comercialmente disponible pero su tamaño y elevado costo lo hacen poco versátil. (75).
El análisis de videos, es una alternativa para determinar la trayectoria de los instrumentos y de esta manera la calidad de los movimientos realizados, sin interferir con el procedimiento. Sin embargo, involucran complejos sistemas de grabación y análisis de imagen, aún no estandarizados y de poca disponibilidad. (76-78)
En definitiva, se han utilizado múltiples dispositivos de rastreo en un intento por darle objetividad a la evaluación de destrezas psicomotoras en CMI. Sin embargo, resultan costosos, lo cual constituye una gran limitante a la hora de su aplicación en nuestro medio. Debido a lo descrito, se ha estudiado el uso de dispositivos de alta disponibilidad que permiten determinar la aceleración como un parámetro relacionado con la calidad del movimiento.
El uso de la aceleración como parámetro de evaluación objetiva del desempeño de los cirujanos al momento de realizar una tarea ha sido previamente propuesto por algunos autores. Cotinet al(79), utilizando un programa adaptado al Virtual Laparoscopic Interface (Immersion Inc), plantearon el estudio de la aceleración y su relación con la sutileza del movimiento. De igual manera Cavalloet al, (80) en su análisis del sistema LapSim® proponen el uso de la aceleración máxima durante la realización de una tarea, siendo está significativamente más baja en los expertos al compararlos con novatos.
Partridgeet al, (81) desarrollaron un sistema de evaluación basado en el uso del dispositivo LEAP Motion Controller® para determinar parámetros como velocidad y aceleración promedio. Sin embargo, el sistema demostró tener grandes limitaciones, ya que fue diseñando para el seguimiento de manos abiertas con los dedos separados, por lo tanto, el tomar el instrumento con la mano cerrada impide al sistema un registro óptimo y produce pérdida intermitentemente el seguimiento.
Hwanget al(82), utilizando un dispositivo con tecnología mixta de seguimiento óptico (IR) y electromagnético, demostraron que los novatos realizan movimientos con mayor aceleración que los expertos. Su inconveniente radica en la complejidad del sistema, lo cual lo hace muy poco versátil.
Oropesaet al(78) reportan validez constructiva para la aceleración promedio, comparan novatos y expertos mediante el uso del complejo método EVA de seguimiento de instrumentos basado en el análisis de videos.
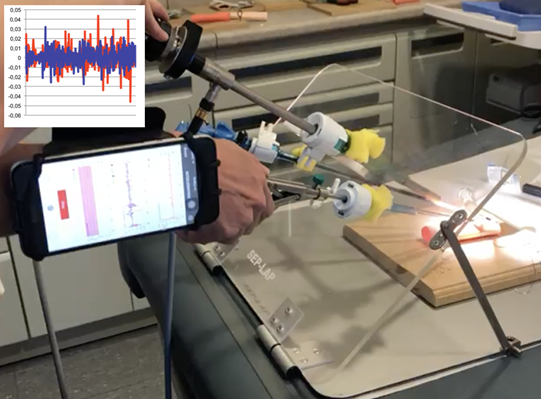
Los autores reportaron en el año 2014 el uso de herramientas de fácil accesibilidad (dispositivo iPhone 6® de Apple Inc.) para el análisis de variables como aceleración promedio y aceleración máxima, permitiendo una aproximación a la calidad de los movimientos realizados por el cirujano durante la realización de una tarea determinada; demostrando así su capacidad para diferenciar individuos con distinto nivel de entrenamiento. (83)(Figura 6)
En cirugía robótica normalmente el número de procedimientos realizados o las horas de consola se utilizaban para medir la experiencia del cirujano, sin embargo, no existe evidencia que indique que esto sea un indicador objetivo del nivel de competencia del cirujano; por lo que el análisis del movimiento se ha utilizado también para determinar la eficiencia en cirugía robótica. (84)
Hunget al(85) y Ohet al(86) estudian y validan método de evaluación del desempeño del cirujano usando grabadora novedosa “dvLogger” la cual permite registrar variables como el seguimiento del instrumento y datos de eventos directamente en el sistema quirúrgico DaVinci®; realizando una medición objetiva de los movimientos del cirujano durante pasos preseleccionados de la prostatectomía radical robótica. Describieron una asociación limitada de los resultados de la medición objetiva mediante este método en comparación con el estándar de oro de evaluación global de habilidades robóticas (GEARS) por cirujanos expertos, insistiendo en la necesidad del desarrollo de métodos de medición estandarizados para la formación y evaluación de cirujanos. (85)
Estudios han demostrado incluso relación entre el análisis de movimiento y la evolución postoperatoria del paciente. (87)
De acuerdo a lo descrito, los patrones de movimiento y la aceleración, parece ser relevante como método de evaluación, al estar relacionada con la calidad del movimiento al momento de realizar una tarea en cirugía laparoscópica.
La cuantificación objetiva de las habilidades quirúrgicas es cada vez más necesaria para ingresar en el medio quirúrgico, a medida que la literatura avanza aumenta la presión en los educadores quirúrgicos y los organismos de acreditación quienes deben incluir un método estandarizado de medición de las destrezas y habilidades a lo largo de la carrera del cirujano.

