










Servicios Personalizados
Revista
Articulo
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por emailIndicadores
-
 Citado por SciELO
Citado por SciELO -
 Accesos
Accesos
Links relacionados
-
 Similares en
SciELO
Similares en
SciELO
Compartir

 Permalink
PermalinkRevista de la Facultad de Ingeniería Universidad Central de Venezuela
versión impresa ISSN 0798-4065
Rev. Fac. Ing. UCV v.26 n.1 Caracas mar. 2011
Diseño de un controlador difuso basado en el esquema del compensador paralelo distribuido (PDC)
Milagros Espinoza Morillo
Fundación Instituto de Ingeniería. Centro de Ingeniería Eléctrica y Sistemas. Venezuela e-mail: mespinoza@Fii.org
RESUMEN
En este artículo se presenta una metodología para la estabilización de sistemas no lineales. Se emplea el modelo difuso propuesto por Takagi-Sugeno (T-S), el cual muestra que es posible aproximar sistemas no lineales mediante el modelado utilizando técnicas de lógica difusa, asignando al consecuente de cada regla una ecuación lineal, esta característica permite que para cada subespacio lineal o regla del modelo, se pueda derivar un controlador difuso que combine las acciones de los controladores lineales de cada regla. En el método del compensador paralelo distribuido (PDC) se obtiene un controlador lineal a partir de cada regla y el resultado es un controlador difuso que es una combinación difusa de los controladores obtenidos en cada regla. Se presentan tres ejemplos de sistemas no lineales que alcanzan la estabilidad mediante el método propuesto.
Palabras clave: Lógica Difusa, Compensador Paralelo Distribuido, Sistemas No lineales, Estabilidad, Sector no Lineal.
FUZZY CONTROLLER DESIGN BASED ON THE DIAGRAM OF THE PARALLEL DISTRIBUTED COMPENSATOR (PDC)
ABSTRACT
A methodology for stabilization of non-linear systems is presented in this article. The fuzzy model proposed by Takagi- Sugeno (T-S), which shows the possibility to approximate non-linear systems by means of modeling using fuzzy logic techniques, assigning a linear equation to the consequent of each rule, is used. This characteristic allows that, for each linear subspace or model rule, a fuzzy controller can be derived that combines the action of the linear controllers of each rule. In the method of the parallel distributed compensator (PDC), a linear controller from each rule is obtained and the result is a fuzzy controller which is a fuzzy combination of the obtained controllers in each rule. Three examples of non linear systems that reach stability by means of the proposed method are presented.
Keywords: Fuzzy Logic, Parallel Distributed Compensator, Non linear Systems, Stability, Sector Nonlinearity.
Recibido: octubre de 2008 Revisado: mayo de 2011
INTRODUCCIÓN
La lógica difusa constituye una herramienta importante para el control de procesos industriales complejos, donde resulta difícil obtener la representación en el espacio de estados de la planta a controlar debido a la complejidad del proceso. En tal sentido, se recurre a la experiencia humana para la obtención del controlador. El control difuso está basado en la implementación del conocimiento del experto, utilizando para ello reglas de control Si-Entonces, las cuales relacionan las variables de entrada del controlador por medio de términos lingüísticos. Por tanto, un controlador difuso, contiene un algoritmo que es capaz de convertir una estrategia de control lingüística en una estrategia de control automático.
El uso de la modelación, empleando el esquema difuso propuesto por Takagi-Sugeno (1985), ha provisto de una manera novedosa de plantear los problemas de estabilidad y estabilización de sistemas no lineales, tanto para el caso continuo como para el caso discreto.
La estabilidad es una de las características más importantes de los sistemas dinámicos. En general, una solución es estable si un cambio pequeño en las condiciones iniciales no genera un cambio considerable en las trayectorias del sistema. Existen diferentes tipos de problemas de estabilidad en los sistemas dinámicos.
La estabilidad de un sistema depende del comportamiento del punto de equilibrio y de las condiciones inciales. Para los puntos de equilibrio, la estabilidad generalmente se caracteriza en el sentido de Lyapunov, aunque existen otros criterios para determinarla. Se considera que un punto de equilibrio de un sistema dinámico es estable en el sentido de Lyapunos, si todas las soluciones que nacen en una vecindad del punto de equilibrio permanecen en dicha vecindad; de otra forma resulta inestable. El punto de equilibrio es asintóticamente estable si las soluciones además de permanecer en una vecindad del mismo, tienden hacia el punto de equilibrio a medida que transcurre el tiempo. El punto de equilibrio es globalmente asintóticamente estable, si atrae al estado del sistema independientemente del estado inicial.
En el método del compensador paralelo distribuido (PDC) se diseña un controlador para cada una de las regla del modelo difuso utilizando en cada una de ellas técnicas de diseño de control lineal. El resultado es un controlador difuso total (generalmente no lineal), que es una combinación difusa de cada controlador lineal individual.
Para Akar & Özgüner (2000), los sistemas difusos son vistos como un sistema interconectado. En este trabajo los autores desarrollan una teoría que permite asociar un sistema difuso con otro en un espacio de mayor dimensión, llamado espacio expandido. Diseñaron un compensador paralelo distribuido descentralizado en el espacio expandido. En el cual, la solución encontrada es contraída e implementada en el sistema difuso original. Alcanzaron resultados sobre la estabilidad y estabilización de los sistemas propuestos tanto en tiempo continuo como en tiempo discreto vía funciones de Lyapunov.
Pitalúa (2005) utilizó el esquema del PDC con el objetivo de investigar si para un sistema difuso no lineal continuo obtenido por medio del modelado Takagi-Sugeno (1985), es posible garantizar su estabilidad. Para ello, el autor realiza la discretización cada subsistema del sistema difuso continuo, empleando las mismas funciones de membresía que utilizan estados discretos y obtuvo un controlador difuso. El autor demostró que bajo ciertas condiciones, es posible estabilizar también el sistema difuso continuo a un criterio de estabilidad local y a uno de estabilidad global.
El-Din et al. (2007), diseñaron un regulador basado en un observador para modelos difusos. En este trabajo se derivan las condiciones adecuadas de las desigualdades matriciales para el caso en tiempo continuo. Los autores diseñaron un compensador paralelo distribuido utilizando la función cuadrática de Lyapunov modificada. Al incluir limitaciones en la señal de entrada, se muestra que el compensador puede estabilizar el sistema aun con las cotas más estrictas de la señal de control. Relajaron las condiciones de estabilidad para ampliar la clase de controladores difusos que garanticen la estabilidad. La contribución principal de este trabajo es la obtención de nuevas condiciones para las LMI´s que puedan ser usadas en el diseño de reguladores basados en observadores. Para ello se requiere la obtención de nuevas matrices de transformación.
García et al. (2009), trabajaron con el proceso de renovación de la carga en motores turbodiesel. Este sistema presenta un comportamiento altamente no lineal, razón por la cual la aplicación de las técnicas clásicas de diseño de controladores resulta ineficiente para atender los requerimientos de este sistema. A partir de los datos experimentales obtuvieron un modelo difuso Takagi-Sugeno (1985) y diseñaron un controlador difuso óptimo empleando el esquema del compensador paralelo distribuido.
En este trabajo se presenta el esquema del compensador paralelo distribuido y las condiciones que garantizan la estabilidad de los sistemas propuestos. Tres ejemplos ilustrativos validan la propuesta.
MODELO DIFUSO TAKAGI-SUGENO (T-S) (1985)
El modelo difuso propuesto por Takagi-Sugeno (T-S) es un modelo basado en reglas de tipo si-entonces, las cuales representan relaciones entrada-salida locales lineales de sistemas no lineales. La principal característica de este modelo es que puede expresar con una aproximación arbitraria (Espinoza, 2004), y en algunos casos, la dinámica de un sistema no lineal en base a descripciones locales definidas por subsistemas lineales, donde cada uno es válido en una cierta región de operación. Cada región de operación se de- fine por una parte condicional, similar a las reglas difusas del modelo Mandani (Driankov, 1996). La diferencia con las reglas del modelo Mandani es que la parte consecuente de cada regla es una expresión analítica que describe el modelo local correspondiente (Tanaka, 2001).
Sea el sistema no lineal en tiempo continuo:
o, en tiempo discreto:
donde:
![]()
la salida de los sistemas. Es posible describir el comportamiento entrada-salida de los sistemas no lineales por un modelo difuso T-S descrito por las siguientes reglas:
Sistemas en tiempo continuo:
Regla i
Si z1(t) es F1i y ... zp(t) es Fpi
Sistemas en tiempo discreto:
Regla i
Si z1k(t) es F1i y ... zpk(t) es Fpi

donde:
z1(.),..., zp(.) representan las variables premisas medibles, las cuales pueden coincidir con el vector de estado (x(t), xk) o un conjunto parcial de este vector a través de las señales de salida y(.). F1i son los correspondientes conjuntos difusos.
donde:
El modelo difuso se obtiene utilizando el fusificador elemento único (singleton), motor de inferencia por producto y el defusificador centro de gravedad (Wang, 1997). El sistema difuso que se obtiene es la combinación lineal mi(.) de los modelos locales, de manera que:
Para sistemas continuos:
donde:
En sistemas discretos:
donde:
El término Fpi (zjk) es el grado de membresía de zjk en Fpi.
El peso normalizado para cada regla:
No linealidad tipo sector
La no linealidad tipo sector (Tanaka, 2001) propone lo siguiente: considere un sistema no lineal:

donde f(0) = 0. El objetivo es encontrar un sector global que contenga completamente a la función f(x(t)) de manera tal que:
![]()
La figura 1 muestra el sector global en [a1,a2].
Figura 1. No linealidad tipo sector global
Existen sistemas no lineales para los cuales resulta complicado establecer sectores globales, para tales sistemas se consideran sectores locales. En la figura 2 se muestra el sector no lineal local para f(x1(t)) = sen(x1(t)) dentro de la región local definida por -p/2 < z1(t) < p/2.
Figura 2. sen(x1(t)) y su sector local
El proceso de defusificación se lleva a cabo mediante:

donde:
Compensador paralelo distribuido (PDC)
El PDC ofrece un procedimiento para diseñar un controlador difuso proveniente de T-S, en el que cada regla de control es diseñada desde su regla correspondiente en el modelo difuso T-S, esto es, el controlador comparte los mismos conjuntos difusos que se encuentran en los antecedentes del modelo. Este compensador fue propuesto por Kang & Sugeno en 1992. Sin embargo, la estabilidad de los sistemas de control no fue contemplada en el procedimiento de diseño. Esto fue mejorado y la estabilidad de los sistemas de control fue analizada, recibiendo con esto, el nombre de compensador paralelo distribuido, donde la idea principal es diseñar un controlador para cada regla del modelo difuso utilizando en cada regla técnicas de diseño de control lineal.
Lo anterior resulta en un controlador difuso total (por lo general no lineal), que es una combinación difusa de cada controlador lineal individual. Observe el concepto del PDC en el esquema de la figura 3.
Figura 3. Esquema del compensador paralelo distribuido
El controlador difuso utilizando el PDC para los modelos difusos (5) y (7) es:
para el sistema continuo:
Regla i
Si z1(t) es F1i y..... y zp(t) es Fpi entonces u(t) = Ki x(t)
el controlador es:
![]()
Para el sistema discreto:
Si z1k es F1i y..... y zpk es Fpi entonces uk = Ki d xk
el controlador está definido por:
![]()
A continuación se presentan tres ejemplos que demuestran que el PDC es una opción viable para estabilizar un sistema.
Ejemplo 1 (Tanaka & Sugeno), 1992)
Dado el siguiente sistema no lineal en función del tiempo:
Considerando x1(t) ![]() [-1,1] y x2(t)
[-1,1] y x2(t) ![]() [-1,1]. El sistema puede ser representado como:
[-1,1]. El sistema puede ser representado como:
Definiendo z1 x1x2 y z2 (3 + x2)x21 ,tenemos:
Las figuras 4 y 5 muestran los sectores globales para z1 y z2, donde los sectores están definidos por planos. Se observan los máximos y mínimos de z1 y z2, respectivamente.
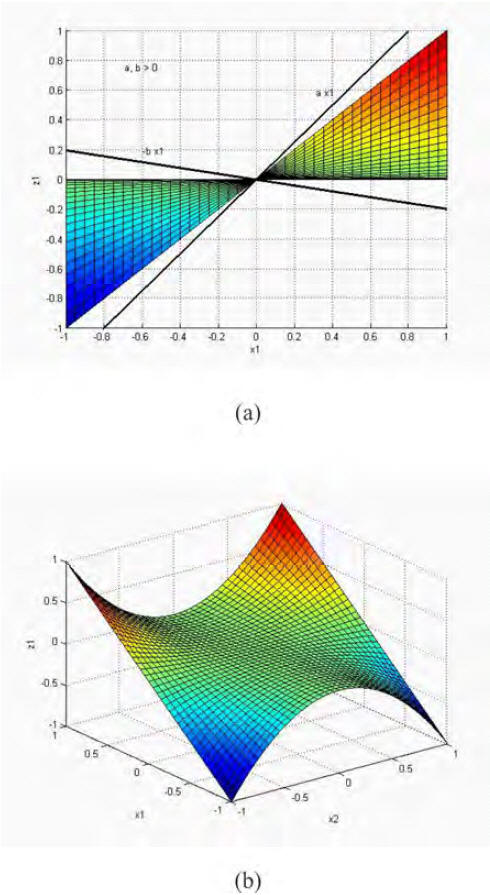
Figura 4. Sector global para z1. (a) Valores máximos y mínimos de z1. (b) Sector global de z1.
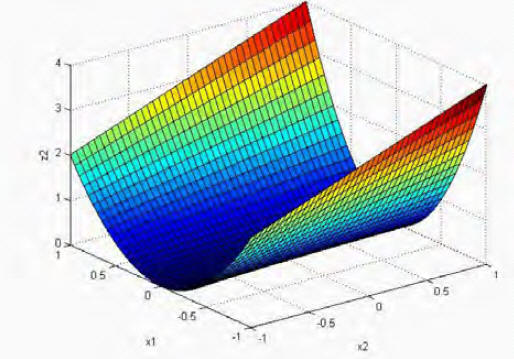
Figura 5. Valores máximos y mínimos de z2
Los valores máximo y mínimo de z1 y z2 para el intervalo dado son:
pueden ser representados para z1 y z2 como:

donde:

Las funciones de membresía mi pueden ser calculadas a partir de:
Las funciones de membresía M1, M2, N1 y N2 se establecen con las variables lingüísticas "positivo", "negativo", "grande" y "pequeño", respectivamente, como se muestra en las figuras 6 y 7.
Figura 6. Funciones de membresía para z1
Figura 7. Funciones de membresía para z2
El sistema no lineal se representa como el modelo difuso de acuerdo a las siguientes reglas:
Regla 1:
Si z1 es "positivo" y z2 es "grande" entonces x = A1x
Regla 2:
Si z1 es "positivo" y z2 es "pequeño" entonces x = A2x
Regla 3:
Si z1 es "negativo" y z2 es "grande" entonces x = A3x
Regla 4:
Si z1 es "negativo" y z2 es "pequeño" entonces x = A4x
donde:
Aplicando el esquema del PDC se obtiene el siguiente modelo difuso:

que puede ser expresado:

donde:
Simulando el sistema con u = 0 se tiene, como se aprecia en la figura 8, donde se muestra el comportamiento de las señales de estado X1 y X2:
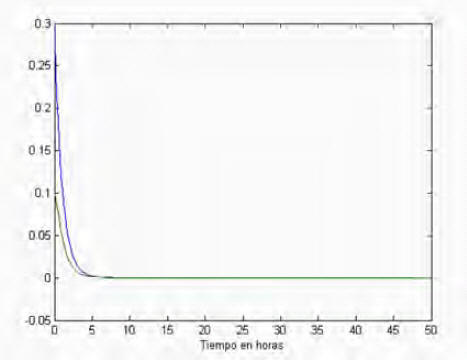
Figura 8. Respuesta del sistema
Ejemplo 2 (Espinoza, 2007)
Sea el modelo de un proceso de fermentación de un cultivo descrito por:
donde:
x1 = biomasa, x2 = sustrato, d = Cte, sf = entrada, r(s) = no linealidad del sistema, sin = concentración del sustrato en la alimentación, y = rendimientos K, s = sustrato

Considerando Sin como entrada, el sistema no lineal se puede representar de la siguiente forma:
La no linealidad del sistema r(s) está dada por la velocidad específica de crecimiento mostrada en la figura 9.
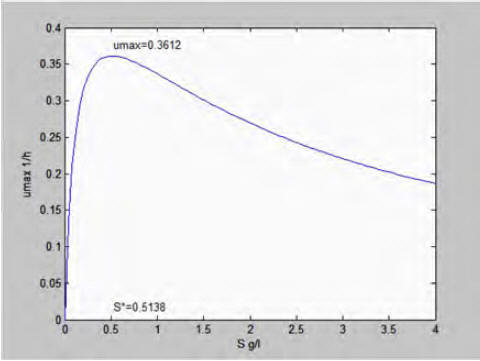
Figura 9. Velocidad específica de crecimiento.
El sistema no lineal (x·(t) = f(x(t)) + bu(t) dado se puede representar como:
La no linealidad r(s) es una no linealidad tipo sector global:
Calculando los máximos y mínimos de la no linealidad en la región s(t) ![]() [-0.0191, 4]
[-0.0191, 4]
Se tiene:
z1(t) puede ser escrito como:
![]()
Limitando con los valores máximos y mínimos:
![]()
Las funciones de membresía se calculan resolviendo para M1z1(t) y M2z1(t):
en la figura 10 se muestran las funciones de Membresía M1 y M2.
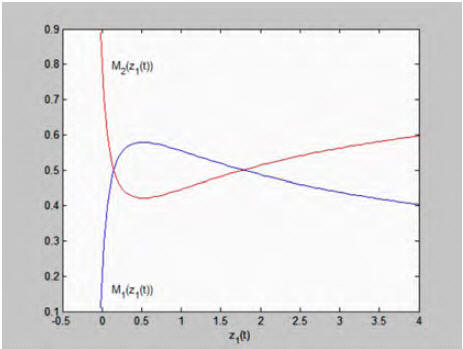
Figura 10. Funciones de membresía
Como se tiene sólo una no linealidad el sistema no lineal se puede representar como dos subsistemas y las reglas son:
La defusificación se lleva a cabo mediante:
donde el sistema no lineal puede ser representado por:
![]()
entonces:

Diseño del PDC
Los subsistemas están representados por:
La figura 11 muestra la convergencia a cero de los estados a una entrada sin.
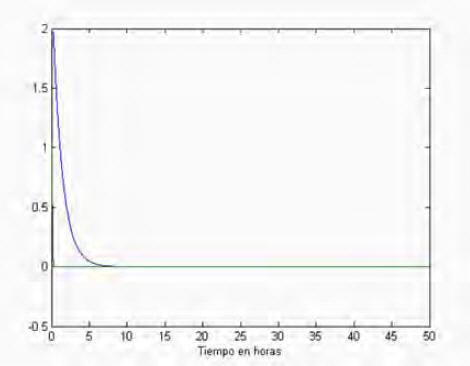
Figura 11. Respuesta del sistema con las condiciones iniciales x(0) = 0.2 y s = 0.3.
Ejemplo 3 (Meda et al, 2005)
Considere el modelo de una barra moviéndose en un plano vertical dado por:

donde:
u es el torque aplicado a la barra.
El sistema puede ser representado como:
definiendo:

El comportamiento del movimiento de la barra en el plano vertical es aproximadamente descrito por las reglas:
Regla 1
Si x1(t) está cerca de 0

Regla 2
Si x1(t) está cerca de ± p/2

Las funciones de membresía son:
Las matrices de los subsistemas difusos son:

Las ganancias obtenidas a partir de las desigualdades matriciales (LMIs) son:

El controlador difuso obtenido mediante el esquema del PDC tiene la forma:
![]()
En la figura 12 se muestran la respuesta de los estados x1 y x2 del sistema al controlador u1(t)
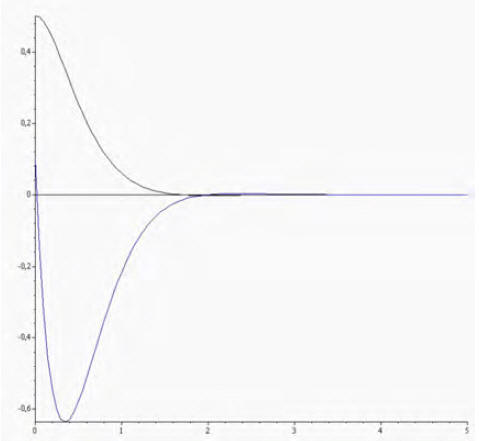
Figura 12. Respuesta del sistema con las condiciones iniciales x1 = 0.5 y x2 = 0.1.
Estabilidad de modelos difusos T-S
Condiciones de estabilidad utilizando el esquema PDC
En los sistemas dinámicos lineales, no lineales o difusos la estabilidad es una característica importante. Muchas investigaciones se han realizado en este sentido. Una aportación importante en el estudio de la estabilidad en sistemas difusos fue presentada por Tanaka & Sugeno (1992), al encontrar una condición de suficiencia para la estabilidad asintótica del punto de equilibrio del modelo difuso mediante los siguientes teoremas:
Teorema 1. Suponga que los pares (Ai, Bi) para i = 1,..., r son estabilizables, entonces el punto de equilibrio del sistema difuso continuo (5) es, globalmente, asintóticamente estable si existe una matriz común definida positiva P tal que
![]()
para i = 1,2,..., r , y
para i < j ≤ r donde:

Teorema 2. Suponga que los pares (Aid + Bid ) para i = 1,..., r son estabilizables, entonces el punto de equilibrio del sistema difuso discreto (7) con la ley de control (15) es globalmente asintóticamente estable si existe una matriz común definida positiva P tal que:
![]()
para i = 1,2,..., r , y

para i < j ≤ r donde:

De los teoremas 1 y 2 podemos concluir que si cada subsistema lineal puede ser estabilizado y si existe una matriz común P definida positiva que satisface las ecuaciones matriciales de Lyapunov (50), (51) o (53), (54), entonces el controlador (14) o (15) estabilizará los sistemas difusos (5) o (7), respectivamente.
Estabilidad cuadrática en lazo cerrado
Considere el modelo difuso
Regla i
Si z1(t) es F1i y zp(t) es Fpi entonces
Utilizando la inferencia difusa lineal (Palacios, 2004), el modelo difuso obtenido del sistema no lineal tiene la forma
donde:

Si se define:
La ecuación (57) se expresa como:

La expresión del sistema difuso tipo T-S para el PDC a partir de (14), viene dada por:

Si se introduce una función cuadrática de Lyapunov V(x) = xTPx el resultado se expresa en el siguiente teorema:
Teorema 3. El equilibrio del sistema difuso continuo (57) donde las matrices Ki , 1, ... , r son globalmente, asintóticamente estables si existe una matriz simétrica Q = P-1 común definida positiva que satisface las siguientes desigualdades:
donde:
Vi = Ki Q , i = 1, 2, ... , r , son las nuevas matrices de las LMI´s.
El problema del regulador PDC está en encontrar las ganancias Vi , i ![]() {1,..., r} que satisfacen las condiciones del teorema con una matriz común Q definida positiva.
{1,..., r} que satisfacen las condiciones del teorema con una matriz común Q definida positiva.
Se observa que este tipo de comando necesita la solución de ![]() de las LMI.
de las LMI.
En el caso de que las matrices Bi sean comunes ( B1 = B2 = ... = Br ) las condiciones del teorema pueden simplificarse como sigue:
Lema 1: Suponga que B1 = B2 = ... = Br . El origen del sistema difuso (61) es globalmente, asintóticamente estable si existe una matriz simétrica Q, definida positiva que satisface las desigualdades (62).
CONCLUSIONES
El modelo difuso de Takagi & Sugeno (1985) permite aproximar el comportamiento de un sistema no lineal incorporando características de los sistemas lineales donde los subsistemas lineales que forman parte del consecuente de las reglas representa el comportamiento del sistema alrededor de algún punto de operación.
Los resultados muestran que es posible aproximar arbitrariamente sistemas no lineales y en algunos casos representarlos exactamente mediante el modelado utilizando técnicas de lógica difusa.
Para garantizar que el sistema difuso alcance la estabilidad es suficiente con encontrar una matriz común P definida positiva tal que se satisfagan las desigualdades matriciales de los teoremas 1 y 2.
El controlador diseñado utilizando el método del compensador paralelo distribuido, permite al sistema alcanzar la estabilidad, aspecto que se demuestra en los tres ejemplos, figuras 8, 11 y 12, respectivamente.
Las ventajas del PDC son las siguientes:
1. El procedimiento de diseño es sencillo.
2. La dificultad de diseño del controlador se reduce a un problema de tipo de desigualdad matricial (Linear Matriz Inequation, LMI), en el cual se calculan las matrices de estabilización del sistema dado.
REFERENCIAS
1. Akar, M. & ÖzgÜnEr, Ü. (2000). Descentralized parallel distributed compensator design for Takagi-Sugeno fuzzy systems. IEEE Transactions on Fuzzy Systems, pp. 691-704. [ Links ]
2. Driankov, D., HEllEnDoorn, H., rEinfrank, M. (1996) An Introduction to Fuzzy Control. New York, USA: Springer- Verlag. s/n. [ Links ]
3. El-Din, M., EMara, H., ElsHafEl, a., BaHgat, a. (2007). Observer Based Fuzzy-Control Design Using Relaxed LMI Conditions. Proceedings of the 46th IEEE Conference on Decision and Control. New Orleans, LA, USA. pp. 5312-5317. [ Links ]
4. Espinoza, M. (2007). Estabilización de Sistemas No Lineales Discretizables Exactamente. Cinvestav. Guadalajara, México. [ Links ]
5. Espinoza, M., MoralEs, t., Castillo, B. (2004). Problema de estabilización práctica para una clase de sistemas no lineales. En Memorias del XI Congreso Latinoamericana de Control Automático. Cuba. s/n. [ Links ]
6. Farinwata, s., filEv, D., langari, r. (2000). Fuzzy Control Synthesis and Analysis. New Jersey, USA: John Wiley and Sons. s/n. [ Links ]
7. GarCía, s., salCEDo, J., BlasCo, X., MartínEz, M. (2009). Sistema de control borroso para el proceso de renovación de la carga en motores turbodiesel. Revista iberoamericana de automática e informática industrial. pp. 36-48. [ Links ]
8. MEDa, J., Castillo, B. titli, a. (2005). A fuzzy output regulator for Takagi-Sugeno fuzzy models. Cinvestav. Guadalajara, México. [ Links ]
9. PalaCios, E. (2004). Contribution à la commande floue de type Takagi-Sugeno des systèmes non-linèaires. Francia. [ Links ]
10. Pitalúa, n. (2005). Estabilización global de un sistema difuso continuo Takagi-Sugeno por medio de su modelo discreto. México, Cinvestav. s/n. [ Links ]
11. Takagi, t. & sugEno, M. (1985). Fuzzy identification of systems and its aplications to modeling and control. IEEE Trans. Syst. Man, Cybernet, pp. 116-132. [ Links ]
12. Tanaka, k. & sugEno, M. (1992). Stability analysis and design of fuzzy control systems. Fuzzy Sets Syst, pp. 135-156. [ Links ]
13. Tanaka, k. & wang, H. (2001). Fuzzy Control Systems Design and analysis. New York, USA: John Wiley & Sons, Inc. s/n. [ Links ]
14. Wang, l. (1997). A course in Fuzzy Systems and Control. New Jersey, USA: Prentice Hall. s/n. [ Links ]
