











 Español (pdf)
Español (pdf)
 Articulo en XML
Articulo en XML Referencias del artículo
Referencias del artículo
 Enviar articulo por email
Enviar articulo por email Citado por SciELO
Citado por SciELO  Similares en
SciELO
Similares en
SciELO 
 Permalink
Permalink
INTRODUCCIÓN
El suavizado de curvas es una técnica estadística fundamental para modelar relaciones no lineales entre variables. En este contexto, los P-splines han emergido como una herramienta poderosa y flexible. Este análisis argumentativo explorará en profundidad las ventajas y aplicaciones de los P-splines en el suavizado de datos con estructura no lineal, así como sus limitaciones y consideraciones.
Un spline es la solución a un problema de optimización. Para Ramírez y Polack (2020) puede ser considerada “como una técnica de estimación de funciones no paramétricas” (p. 194). En un sentido real, los splines representan una evolución de la inferencia estadística clásica y cierra la brecha entre los métodos paramétricos y no paramétricos. Los P-splines son una extensión de los splines tradicionales, combinando la flexibilidad de las bases de splines con la regularización de las diferencias de orden superior de los coeficientes de la spline. Esta combinación permite obtener ajustes suaves y flexibles a los datos, al tiempo que evita el sobreajuste (Barrientos et al., 2007).
Una técnica no paramétrica basada en splines, que permite ajustar datos sin que sea necesario conocer la relación que guardan las variables, se conoce como P-splines y fue introducida por primera vez con este nombre por Eilers y Marx (1996) para cubrir la combinación de B-splines y una penalidad de diferencia discreta cuyas propiedades son muy atractivas. Vale destacar, que existe una base para el conjunto de splines naturales llamada base B-spline la cual está formada por trozos de polinomios conectados entre sí. En general, un B-Spline de grado 𝑝 consiste en p+1 trozos de polinomios de grado 𝑝 que se unen en 𝑝 nodos internos (Salas et al., 2010).
Por su parte, Durbán (2009) expresa que “los factores que han hecho que esta técnica haya alcanzado tanta popularidad en los últimos años han sido la creciente complejidad de los datos con los que se trabaja” (p. 197), y los avances informáticos que han facilitado el ajuste de este tipo de modelos, reduciendo significativamente el costo computacional. Es por ello, que, desde su aparición, un poco más de veinte años, se han vuelto populares en aplicaciones y en trabajos teóricos, ya que la combinación de una base B-spline y una penalidad se prestan para una variedad de generalizaciones, porque se basa en la regresión.
Por lo anterior, es evidente que los P-splines representan una buena solución para la estimación de la función regresora por dos razones: la primera, es su flexibilidad para responder a la variación local sin permitir comportamientos patológicos, y segundo, el actual grado de suavidad es controlable. Aun cuando el grado de suavidad correcto es desconocido, estas características junto con el método de validación cruzada permiten un ajuste no paramétrico, de allí, que se haya convertido rápidamente en una técnica popular de suavizado, debido a su simplicidad y flexibilidad en el manejo de una amplia gama de situaciones de modelado no paramétrico y semiparamétrico (Toriz y Sánchez, 2017).
La idea principal de la estimación P-spline se basa en emplear una base dimensional grande pero finita; esta versión penalizada proporciona un ajuste suave a diferencia del ajuste paramétrico simple, que conduciría a estimaciones variables y ondulantes.
En cuanto a las aplicaciones, el hecho de que los P-splines se puedan escribir como un modelo mixto, proporciona ventajas en dos ámbitos distintos: por un lado, hace que se pueda flexibilizar la hipótesis de linealidad en infinidad de modelos, y por otro, es posible incluir estructuras complejas en los modelos usuales de suavizado. Otra área en el que los P-splines están tomando un papel relevante es en el análisis de datos longitudinales, tan frecuentes en aplicaciones médicas y biológicas, aquí, los P-splines permiten ajustar modelos más flexibles en los que las diferencias específicas individuales son una función suave del tiempo (Álvarez et al., 2015). De acuerdo con lo descrito en las ideas anteriores, este trabajo de investigación tuvo como objetivo principal aplicar el método de aproximación P-splines para suavizado de curvas en presencia de datos con estructura no lineal.
MÉTODO
Datos experimentales
Para aplicar e ilustrar la técnica de suavizado enfocado en Psplines, se utilizaron datos reales proporcionados por Lugo (2018), correspondientes a su tesis doctoral titulada “Efecto de Bacterias Antagonistas y Extractos Vegetales sobre la Dinámica Poblacional de Ralstonia Solanacearum (Smith) Yabuuchi et al. y la Expresión de Síntomas en Tomate (Solanum Lycopersicum l.)”
Para la obtención de R. solanacearum se planificó un experimento en un diseño completamente aleatorizado, con cinco tratamientos y tres réplicas. La unidad experimental consistió de una maceta de 1500 g de capacidad (una planta por maceta). Los tratamientos se describen en la tabla 1.
Tabla 1. Tratamientos del experimento para la obtención de R. solanacearum.
| TRATAMIENTO | CARACTERÍSTICA |
|---|---|
| 1 | Plantas control. Sin inoculación de la bacteria. |
| 2 | Plantas control. Plantas inoculadas solo con R. solanacearum. |
| 3 | Plantas inoculadas con R. solanacearum y tratadas con extracto acuoso de R. communis (Tártago). |
| 4 | Plantas inoculadas con R. solanacearum y tratadas con la bacteria antagonista P fluorescens. |
| 5 | Plantas inoculadas con R. solanacearum y tratadas con el producto comercial Timorex. |
Fuente: Lugo (2018).
La medición del tamaño de la población de R. solanacearum en el suelo, medido en UFC/g de suelo se hizo cada semana, es decir, 20 mediciones de la variable, las cuales se muestran en la tabla 2.
Tabla 2. Población promedio de Ralstonia solanacearum en el suelo, medido en UFC*106 por g de suelo.
| DIA | T1 | T2 | T3 | T4 | T5 | TOTAL |
|---|---|---|---|---|---|---|
| 0 | 0,172 | 0,756 | 1,233 | 0,039 | 7,556 | 1,951 |
| 7 | 0,094 | 0,217 | 2,672 | 0,328 | 14,106 | 3,483 |
| 14 | 0,372 | 2,072 | 7,322 | 0,772 | 9,728 | 4,053 |
| 21 | 0,589 | 1,644 | 8,322 | 0,683 | 10,528 | 4,353 |
| 28 | 0,839 | 2,661 | 8,567 | 1,622 | 16,200 | 5,978 |
| 35 | 1,389 | 2,417 | 11,789 | 1,867 | 17,233 | 6,939 |
| 42 | 1,039 | 2,650 | 12,944 | 1,844 | 12,967 | 6,289 |
| 49 | 1,656 | 1,639 | 13,472 | 2,511 | 15,794 | 7,014 |
| 56 | 1,100 | 2,617 | 10,950 | 2,106 | 15,244 | 6,403 |
| 63 | 0,672 | 1,211 | 11,033 | 2,639 | 12,094 | 5,530 |
| 70 | 0,906 | 0,656 | 10,172 | 2,989 | 10,311 | 5,007 |
| 77 | 1,194 | 1,239 | 12,494 | 2,061 | 12,550 | 5,908 |
| 84 | 0,750 | 0,456 | 12,217 | 2,478 | 9,439 | 5,068 |
| 91 | 0,833 | 0,661 | 13,378 | 1,933 | 9,139 | 5,189 |
| 98 | 1,428 | 1,022 | 10,906 | 2,533 | 8,039 | 4,786 |
| 105 | 1,733 | 1,011 | 9,394 | 1,606 | 7,278 | 4,204 |
| 112 | 1,267 | 0,911 | 10,117 | 1,706 | 8,039 | 4,408 |
| 119 | 1,361 | 0,994 | 7,283 | 1,461 | 5,278 | 3,275 |
| 126 | 1,761 | 0,950 | 11,222 | 1,944 | 5,706 | 4,317 |
| 133 | 1,389 | 0,617 | 6,356 | 1,206 | 5,128 | 2,939 |
Fuente: Lugo (2018).
Dinámica poblacional
Para obtener los modelos matemáticos que describen la dinámica poblacional en el suelo de R. solanacearum bajo las condiciones descritas, el autor utilizó las mediciones de UFC/g de suelo obtenidos de cada tratamiento en la fase experimental, graficó y trató de ajustar a uno o más de los modelos matemáticos tomando en cuenta los basamentos teóricos de los modelos, el ajuste gráfico a la tendencia de los datos y la obtención de estimadores iniciales de los parámetros. Trabajó con 32 series de datos confeccionadas en las condiciones de las plantas definidas como total, sanas y enfermas y a su vez, sobre estas condiciones se definieron series de diferentes longitudes: serie completa y en dos fases, creciente y decreciente.
En total se seleccionaron 82 modelos usando el software R-Project y se eligieron los cinco mejores modelos matemáticos considerando tendencias gráficas, pruebas de t y F realizadas por el software R-Project, coeficientes basados en desviación entre estimados y observados y criterios de información. Las series seleccionadas para este trabajo pueden verse mejor en la tabla 3 junto con los nombres de los modelos para cada serie y los valores de los criterios de información de estos tomados de Bandera y Pérez (2018).
Tabla 3. Series para modelar el comportamiento de R. solanacearum en el suelo bajo las diferentes condiciones del estudio.
| SERIE | LONGITUD | MODELO | AIC | BIC | logLik | R2adj | |
|---|---|---|---|---|---|---|---|
| TOTAL | Completa | Función Racional Cuadrática | 32,278 | 36,261 | -12,139 | 0,867 | |
| TRATAMIENTO 1 | Total | Completa | Bilogístico | 10,150 | 15,129 | -0,075 | 0,710 |
| TRATAMIENTO 2 | Total | Completa | Función Racional Cuadrática | 29,948 | 33,931 | -10,974 | 0,672 |
| TRATAMIENTO 3 | Total | Completa | Ricker | 74,842 | 77,829 | -34,421 | 0,833 |
| TRATAMIENTO 4 | Total | Completa | Función Cuadrática | 12,648 | 16,631 | -2,324 | 0,850 |
| TRATAMIENTO 5 | Total | Completa | Función Racional Cuadrática | 84,512 | 88,495 | -38,613 | 0,765 |
Fuente: Lugo (2018).
Análisis de datos
Para el análisis de los datos se hace uso del software R, específicamente la función gam() para lo cual es necesario cargar el paquete mgcv de Wood (2006). Esta función puede usar p-splines univariantes según lo propuesto por Eilers y Marx (1996). En realidad, este paquete contiene dos funciones que permiten utilizar P-splines: gam y gamm, la diferencia entre las dos es que la segunda permite elegir el parámetro de suavizado mediante REML, mientras que la primera es similar a la función escrita por Hastie y Tibshirani (1990), pero permite utilizar splines de rango bajo, además de haber corregido los errores que existían en el cálculo de la varianza de los parámetros y elige el parámetro de suavizado mediante la validación cruzada generalizada (GCV por sus siglas en inglés). En ambos casos se puede imponer un valor arbitrario para el parámetro de suavizado sin que sea elegido por la propia función, elegir la base a utilizar, según las ofrecidas por el paquete y se puede elegir el número de nodos y el orden de la penalización. Los argumentos de la función GAM se muestran en la tabla 4.
Tabla 4. Argumentos de la función GAM.
| ARGUMENTO | DEFINICIÓN |
|---|---|
| s(x, bs = “ps”) | Término de suavidad. |
| k | Tamaño de la base, nunca debe ser menor que el orden de la penalización. |
| bs | Tipo de base que se utiliza. |
| m | orden de la base y de la penalización. Si 𝑚 es un número único, se toma como orden de base y orden de penalización |
| by | Permite multiplicar curvas por factores. |
| Nodos | Una lista que contiene los nodos suministrados para la configuración básica, en el mismo orden y con los mismos nombres que los datos. Este también puede ser nulo. |
Fuente: Lugo (2018).
El procedimiento para analizar los datos en R se hace de forma similar para las 6 series. Inicialmente se especifica un modelo P spline a través de la función GAM con un término de suavizado de la forma 𝑠 (𝑥, 𝑏𝑠 = "𝑝𝑠", 𝑘=𝑣𝑎??𝑖𝑎𝑏𝑙𝑒, 𝑠𝑝=𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒), el cual especifica una base P-spline con 𝑚=2 por defecto, que significa una base y una penalización de segundo orden. “Las diferencias entre los modelos dependerán de los argumentos variables como el tamaño de base (??) y el parámetro de suavizado (𝑠𝑝), esto con el fin de seleccionar el mejor ajuste p splines para los datos” (Burbano et al., 2022, p. 270).
Es por ello que primero, se especifica un modelo para la serie en cuestión variando el tamaño de base 𝑘 y se hace una selección de los tres mejores modelos, dependiendo de los criterios de información, métodos de selección del parámetro de suavizado e índices, los cuales deben ser mínimos o máximos según sea el caso. Después de obtener el mejor ajuste P spline, mediante un gráfico de dispersión, se verifica el efecto del suavizado comparando este ajuste versus el modelo proporcionado por Lugo (2018) como mejor para la descripción de la dinámica poblacional de R. solanacearum en la serie especificada y se muestra la fórmula del modelo aproximado para el mejor o los mejores ajuste P spline. Luego se cotejan las curvas ajustadas para los distintos valores de k.
Segundo, al obtener el mejor ajuste en la parte anterior, se procede a probar el mismo bajo diferentes valores de 𝜆, con el fin de obtener un valor de este parámetro que optimice el ajuste. Para realizar la variación de λ, se toma como mínimo y máximo, aquel valor donde el AIC tienda a aumentar. Para esto, se consideran los mismos ítems que en la parte anterior. Seguidamente, sobre este ajuste se contrasta gráficamente el efecto de distintos valores del parámetro de suavizado. Los ítems que resumen la información arrojada por los tres mejores modelos seleccionados para escoger el modelo final se describen en la tabla 5.
Tabla 5. Ítems a considerar para la selección del modelo final.
| Ítem | Descripción |
|---|---|
| Modelo | Contiene el nombre del modelo construido a partir de la siguiente nomenclatura, 𝑓𝑖𝑡+𝑠𝑒𝑟𝑖𝑒+.+𝑘, por ejemplo, 𝑓𝑖𝑡𝑇.9 especifica un ajuste p spline de la serie total con un tamaño de base k=9. Cuando el parámetro de suavizado, 𝜆, es variable toma la forma 𝑓𝑖𝑡+𝑠𝑒𝑟𝑖𝑒+.+𝑘+𝑙𝑒𝑡𝑟𝑎, para el modelo anterior y la primera variación de 𝜆 queda expresado de la siguiente manera 𝑓𝑖𝑡𝑇.9𝑎. |
| Fórmula | Función GAM del modelo. |
| Sp | Valor del parámetro de suavizado estimado por la función GAM. |
| s(t) | Significación aproximada del término de suavizado. |
| GCV | Valor del método de selección del parámetro de suavizado, en este caso, Validación Cruzada Generalizada. |
| AIC | Valor del criterio de información de Akaike. |
| BIC | Valor del criterio de información bayesiano. |
| LogLik | Valor del logaritmo de la función de verosimilitud. |
Fuente: Lugo (2018).
RESULTADOS
Los resultados se muestran para cada serie. Para efectos de la comparación del método de suavizado P splines se usan los modelos de la dinámica poblacional de R. solanacearum en el suelo obtenidos por Lugo (2018) y que son etiquetados: modelototal para serie TOTAL, modeloT1 para serie T1, modeloT2 para serie T2 y modeloT3. Cabe destacar, que la variable t, cuyos datos corresponden a la columna DIA de la tabla 1, denota el intervalo de tiempo en que se tomaron las mediciones de la variable respuesta y 𝑦 es utilizada como variable predictora para modelar el ajuste en todas las series.
Resultados de serie TOTAL
Se presenta el modelo planteado por Lugo (2018) para describir la dinámica poblacional de Ralstonia solanacearum en el suelo para la serie TOTAL:

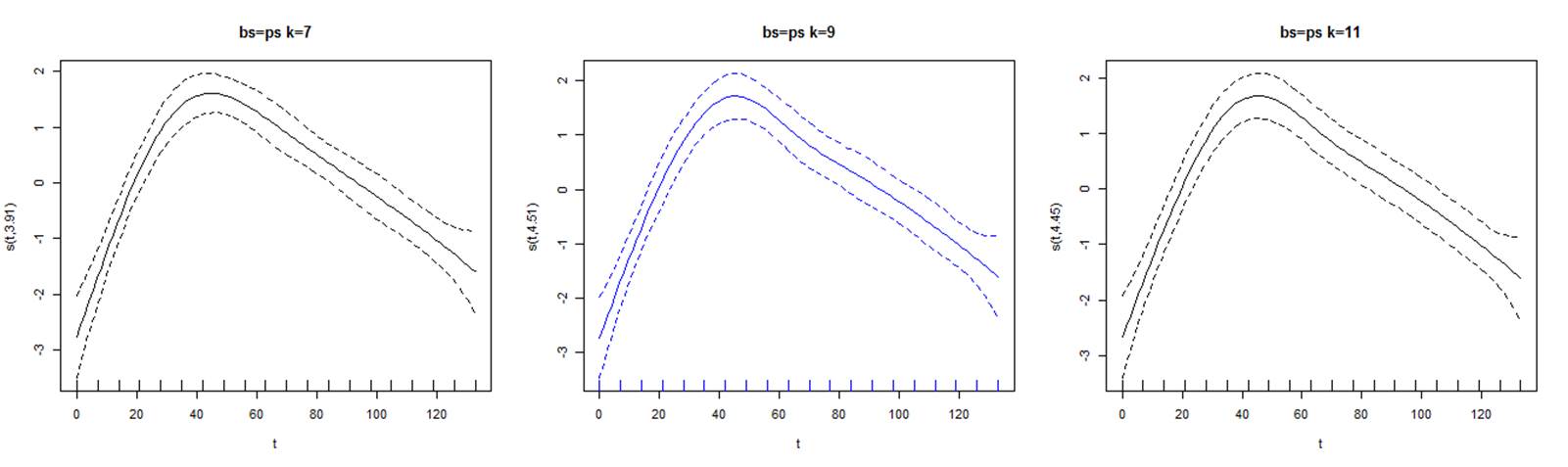
En la tabla 6, se resumen los resultados obtenidos donde se puede observar que en los tres ajustes P splines, el término de suavizado (𝑠(𝑡)), resulta significativo. El modelo fitT.7 arrojó el menor GCV y BIC, sin embargo, el ajuste denotado por el modelo fitT.9, presenta como favorables, tres de los cinco criterios considerados para la selección del mejor, a saber, el menor AIC y el mayor logLik y R2adj, por lo cual se considera como el modelo con mejor ajuste y el modelo aproximado es el siguiente:
fitT.9<-gam (y ~ s(t, bs="ps",k=9))
Tabla 6. Selección del mejor ajuste P spline en serie TOTAL.
| Modelo | Fórmula | Sp | s(t) | GCV | AIC | BIC | logLik | R2adj |
|---|---|---|---|---|---|---|---|---|
| fitT.7 | (y ~ s (t, bs="ps”, k=7)) | 0,0726 | 5,86e-10 *** | 0,3285 | 35,0464 | 40,9273 | -11,617 | 0,864 |
| fitT.9 | (y ~ s (t, bs="ps”, k=9)) | 0,3635 | 1,35e-09 *** | 0,3329 | 34,8921 | 41,3718 | -10,939 | 0,868 |
| fitT.11 | (y ~ s (t, bs="ps”, k=11)) | 1,7761 | 2,2e-09 *** | 0,3355 | 35,0862 | 41,5134 | -11,088 | 0,867 |
| modelototal | función racional cuadrática | 32,278 | 36,261 | -12,139 | 0,867 |
Fuente: Lugo (2018).
Se representa las variantes del ajuste P spline. Note que los ajustes no son tan distintos. En azul, el mejor ajuste. No obstante, al comparar con modelo total, se evidencia que este presenta un menor AIC y un menor BIC en comparación con el mejor ajuste P spline (Figura 1).
Elaboración: El autor.
Figura 1. Representación gráfica del efecto del suavizado con IC del 95% y 3 valores de k para la serie TOTAL.
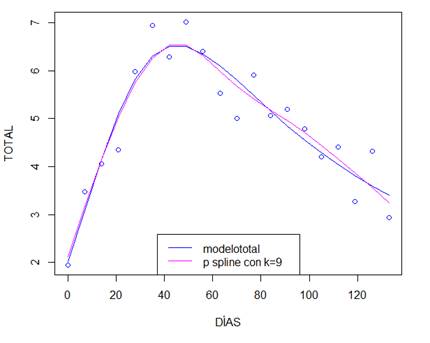
En la figura 2, se contrasta el mejor ajuste P spline seleccionado versus modelo total y puede verse que los modelos no difieren mucho, sin embargo, se nota como el ajuste P spline genera una ondulación en la segunda mitad de los datos.
Ahora bien, en el modelo seleccionado como mejor, fitT.9, se prueban cinco valores distintos para λ entre 0,01 y 10, para un valor fuera de este rango el valor del AIC tiende al aumento. En la tabla 7 se resume la información arrojada. Tome en cuenta que el modelo fitT.9c contiene un valor de 𝜆 estimado por la función GAM, este tiende a ser pequeño, lo que indica que se está frente a un ajuste P splines.
Tabla 7. Selección de sp óptimo sobre el mejor ajuste P spline en serie TOTAL.
| Modelo | Fórmula | s(t) | GCV | AIC | BIC | logLik | R2adj |
|---|---|---|---|---|---|---|---|
| fitT.9a | (y ~ s (t, bs="ps”, k=9, sp=0,01)) | 1,61e-08 *** | 0,3685 | 34,4565 | 43,3457 | -8,3010 | 0,878 |
| fitT.9b | (y ~ s (t, bs="ps”, k=9, sp=0,1)) | 1,64e-09 *** | 0,3381 | 34,4225 | 41,8142 | -9,7879 | 0,875 |
| fitT.9c | (y ~ s (t, bs="ps”, k=9, sp=0,36)) | 1,36e-09 *** | 0,3329 | 34,8867 | 41,3734 | -10,9289 | 0,868 |
| fitT.9d | (y ~ s (t, bs="ps”, k=9, sp=10)) | 2,88e-06 *** | 0,5439 | 45,9348 | 50,2944 | -18,5891 | 0,753 |
Elaboración: El autor.
Al hacer las comparaciones, se encuentra que los modelos fitT.9a y fitT.9c presentan igual número de criterios favorables para optimizar el ajuste. Los modelos aproximados son:
fitT.9a<-gam (y ~ s(t, bs="ps",k=9,sp=0,01)) y fitT.9c<-gam(y ~ (t,bs="ps",k=9,sp=0,36))
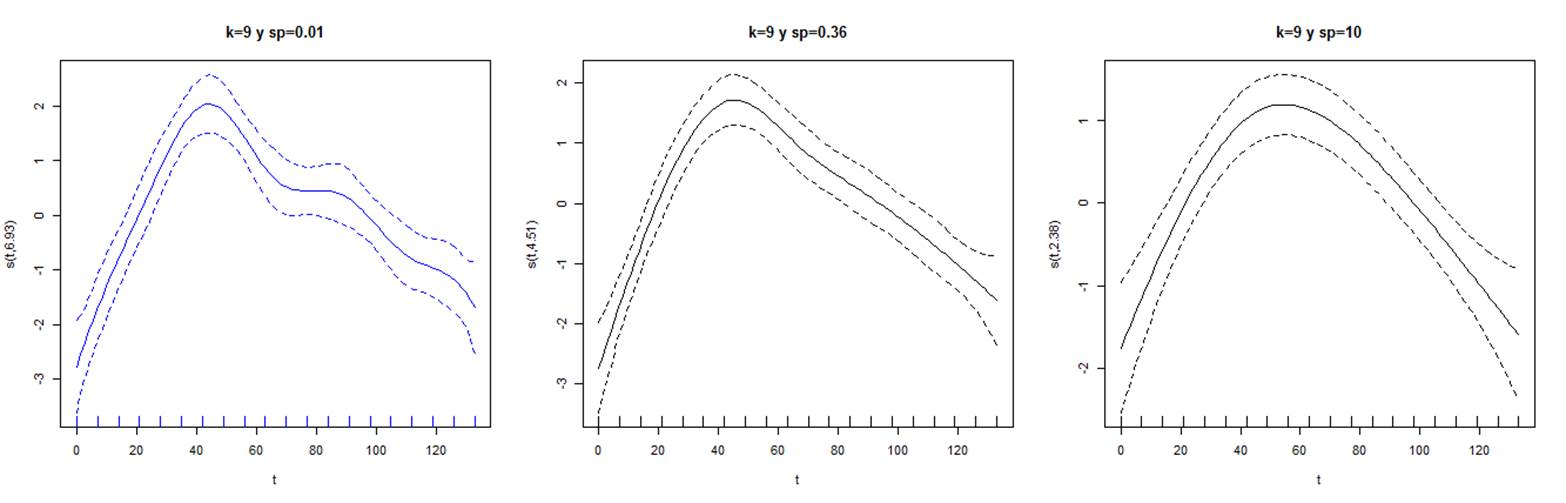
Cuando la penalidad es más débil se obtiene una curva más ondulada, caso contrario ocurre para un mayor 𝜆 que produce curvas más suaves. Esto puede verse mejor en la figura 3. A la izquierda y en azul, el menor valor de 𝜆 genera una curva con más picos, en el centro, el modelo con 𝜆 estimado por la función GAM y a la derecha un 𝜆 mayor.
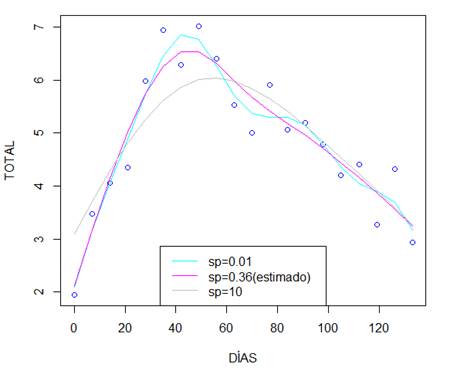
En la figura 4 se evidencia de mejor forma como el valor de 𝜆 controla la suavidad de la curva. Note la ondulación de la curva cuando 𝜆=0.01 y la tendencia lineal que toma cuando 𝜆=10.
Elaboración: El autor
Figura 3. Mejor ajuste P spline para 3 valores distintos de sp en serie TOTAL.
Resultados de Serie T1
El modelo planteado por Lugo (2018) para la serie T1, es el siguiente:

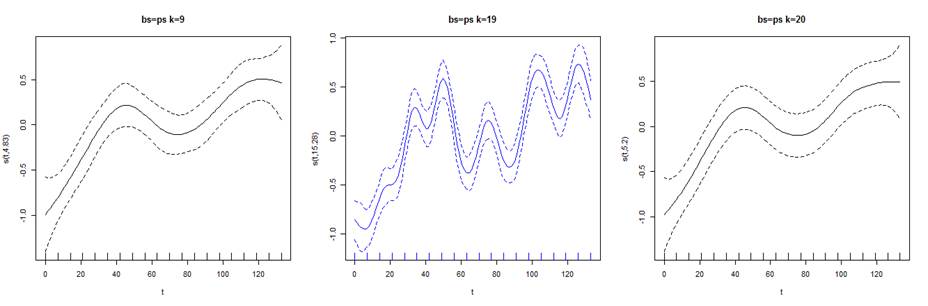
La tabla 8, contiene los resultados para esta serie, donde se evidencia que los tres modelos presentan un suavizado, s(t), significativo, no obstante, el modelo fitT1.19, arrojó los menores valores para CGV, AIC, BIC y los mayores valores para logLik y R2adj en comparación con los modelos restantes y modeloT1, por lo que es considerado como el mejor modelo para el ajuste de esta serie y el modelo aproximado es el siguiente:
FitT1.19<-gam (y ~ s(t,bs="ps",k=19))
Tabla 8. Selección del mejor ajuste P spline para serie T1.
| Modelo | Fórmula | Sp | s(t) | GCV | AIC | BIC | logLik | R2adj |
|---|---|---|---|---|---|---|---|---|
| fitT1.9 | (y ~ s (t, bs="ps”, k=9)) | 0,2314 | 0,000208 *** | 0,0962 | 9,8139 | 16,618 | 1,9265 | 0,717 |
| fitT1.19 | (y ~ s (t, bs="ps”, k=19)) | 0,0201 | 0,000739 *** | 0,0560 | -33,590 | -16,386 | 34,0734 | 0,957 |
| fitT1.20 | (y ~ s (t, bs="ps”, k=20)) | 26,831 | 0,000358 *** | 0,0984 | 9,9291 | 17,103 | 2,2394 | 0,718 |
| modeloT1 | Bilogístico | 10,150 | 15,129 | -0,075 | 0,710 |
Elaboración: El autor.
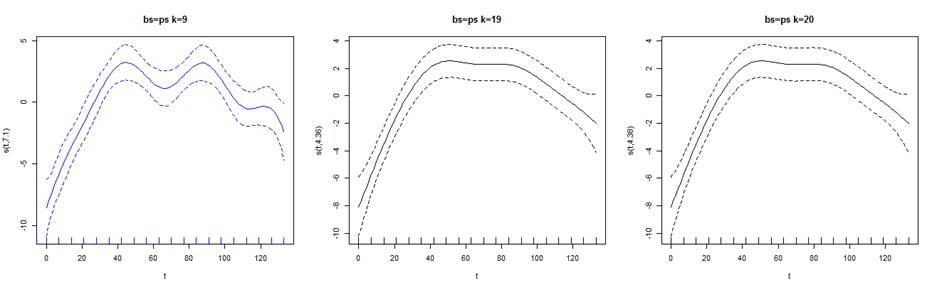
Visualice en la figura 5 como cambia la curva para distintos valores de k. Es fácil notar en el centro y en azul como el ajuste presenta una ondulación mayor en la curva en comparación con los demás que producen curvas más suaves.
Elaboración: El autor
Figura 5. Representación gráfica del efecto del suavizado con IC del 95% y 3 valores de k para la serie T1.
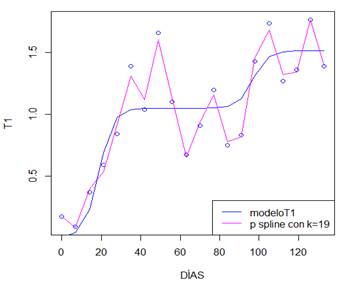
En la figura 6, se puede apreciar la diferencia entre las curvas que producen el mejor ajuste P splines y modeloT1.
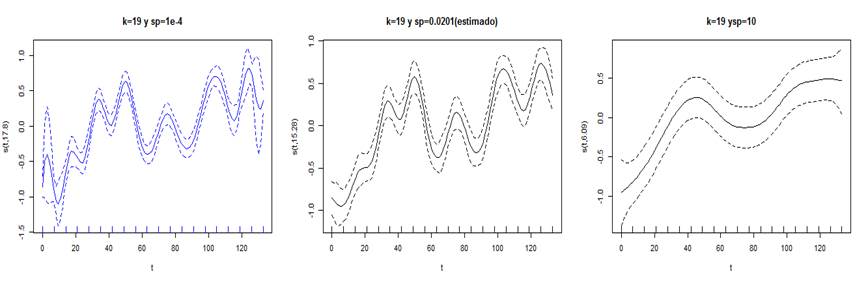
En la tabla 9 se encuentran los resultados para el control del suavizado del ajuste, con un rango de variación de 𝜆 entre 0,00001 y 10. El modelo fitT1.19a presenta los menores valores de los criterios de selección, sin embargo, este suavizado no es significativo. El modelo fitT1.19c arrojó el menor GCV, pero el modelo fitT1.19b generó el menor AIC y BIC y los mayores valores de logLik y R2adj, para el mejor ajuste de la serie T1, aunque la incertidumbre aumenta en los extremos. El modelo aproximado anterior es:
fitT.19b<-gam (y ~ s(t,bs="ps",k=19,sp=0,00001))
Tabla 9. Selección de sp óptimo para el mejor ajuste P spline en serie T1.
| Modelo | Fórmula | s(t) | GCV | AIC | BIC | logLik | R2adj |
|---|---|---|---|---|---|---|---|
| fitT1.19a | (y ~ s (t, bs="ps”, k=9, sp=1e-5)) | 0,128 | 0,1363 | -62,845 | -42,933 | 51,420 | 0,972 |
| fitT1.19b | (y ~ s (t, bs="ps”, k=9, sp=1e-4)) | 0,0841. | 0,0978 | -62,518 | -42,806 | 51,055 | 0,975 |
| fitT1.19c | (y ~ s (t, bs="ps”, k=9, sp=0,02)) | 0,00074 *** | 0,0560 | -33,594 | -16,389 | 34,075 | 0,957 |
| fitT1.19d | (y ~ s (t, bs="ps”, k=9, sp=10)) | 0,000574 *** | 0,1016 | 9,6835 | 17,739 | 3,2491 | 0,728 |
Elaboración: El autor.
En la figura 7, puede observarse el efecto de tres valores distintos de 𝜆 sobre el mejor ajuste P spline.
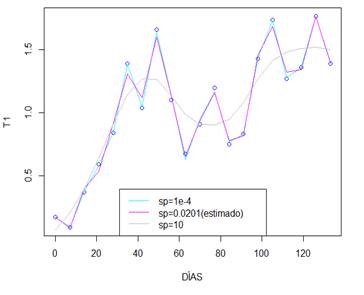
La figura 8, permite comparar las curvas generadas por los ajustes P splines con los valores de 𝜆 fijados arbitrariamente y el estimado por la función GAM.
Resultados de Serie T2
El modelo sugerido por Lugo (2018) para la serie T2, es el siguiente:

El modelo anterior, no describe de forma correcta el patrón de datos correspondiente, lo cual puede deberse a un error de transcripción. Por lo anterior, el modelo aproximado se muestra a continuación:

La tabla 10, recoge los resultados arrojados por los modelos P splines planteados para esta serie. Se puede ver que el modeloT1 presenta el menor BIC mientras que el modelo fitT2.8 generó el menor GCV y AIC y el mayor logLik y R2adj, así se considera a este modelo como la mejor aproximación para la serie T2 y su modelo aproximado es el siguiente: fitT2.8<-gam (y ~ s(t, bs="ps",k=8))
Tabla 10. Selección del mejor ajuste P spline para serie T2.
| Modelo | Modelo | sp | s(t) | GCV | AIC | BIC | logLik | R2adj |
|---|---|---|---|---|---|---|---|---|
| fitT2.7 | (y ~ s (t, bs="ps”, k=7)) | 0,0449 | 0,000426 *** | 0,2674 | 30,7729 | 36,891 | -9,2419 | 0,672 |
| fitT2.8 | (y ~ s (t, bs="ps”, k=8)) | 0,1787 | 0,000368 *** | 0,2671 | 30,6798 | 36,896 | -9,0976 | 0,674 |
| fitT2.9 | (y ~ s (t, bs="ps”, k=9)) | 0,5286 | 0,000597 *** | 0,2716 | 31,0169 | 37,227 | -9,2713 | 0,668 |
| modeloT2 | función racional cuadrática | 29,948 | 33,931 | -10,974 | 0,672 |
Elaboración: El autor.
La figura 9, permite contrastar los ajustes P splines para distintos valores de k. En el centro y en azul la mejor aproximación. Note la ondulación que presenta la curva en el extremo derecho y que los dos ajustes restantes no generan.
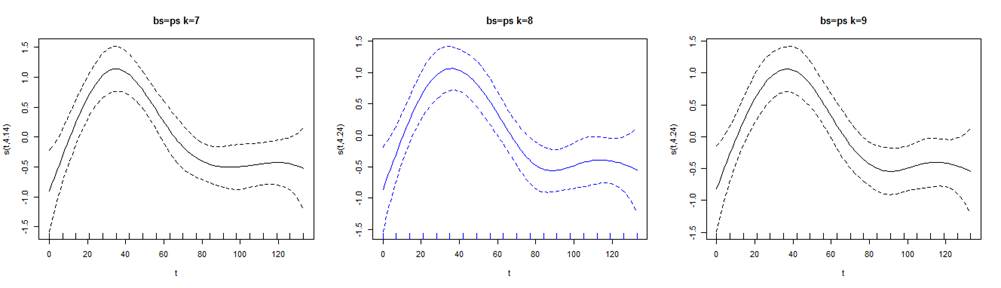
Elaboración: El autor
Figura 9. Representación gráfica del efecto del suavizado con IC del 95% y 3 valores de k para la serie T2.
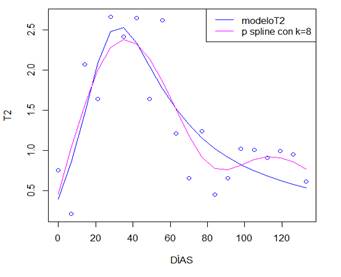
Para verificar la significancia del suavizado P splines en los datos, observe la figura 10, donde se contrastan las curvas generadas por el mejor ajuste P spline y modeloT2.
Para obtener el valor de 𝜆 que optimice el ajuste P spline, se varia en un rango entre 0.001 y 10. Sin embargo, esta variación no causo un efecto significativo, ya que los criterios de selección favorables son proporcionados por el modelo con el valor de 𝜆 estimado por la función GAM. El modelo fitT2.8a arrojó el mayor loglik, mientras que el modelo fitT2.8c, con 𝜆 estimado, presenta el menor GCV, AIC, BIC y el mayor R2adj. Estos resultados se resumen en la tabla 11. El modelo aproximado para este ajuste es:
fitT2.8c<-gam (y ~ s (t, bs="ps",k=8,sp=0,178))
Tabla 11. Selección de sp óptimo para el mejor ajuste P spline en serie T2.
| Modelo | Fórmula | s(t) | GCV | AIC | BIC | logLik | R2adj | |
|---|---|---|---|---|---|---|---|---|
| fitT2.8ª | (y ~ s (t, bs="ps”, k=8, sp=1e-3)) | 0,0025 ** | 0,3469 | 33,392 | 42,173 | -7,878 | 0,65 | |
| fitT2.8b | (y ~ s (t, bs="ps”, k=8, sp=0,01)) | 0,00124 ** | 0,3071 | 31,973 | 39,885 | -8,039 | 0,669 | |
| fitT2.8c | (y ~ s (t, bs="ps”, k=8, sp=0,178)) | 0,000368 *** | 0,2671 | 30,679 | 36,896 | -9,098 | 0,674 | |
| fitT2.8d | (y ~ s (t, bs="ps”, k=8, sp=10)) | 0,0384 * | 0,4735 | 43,303 | 47,292 | -17,64 | 0,335 |
Elaboración: El autor.
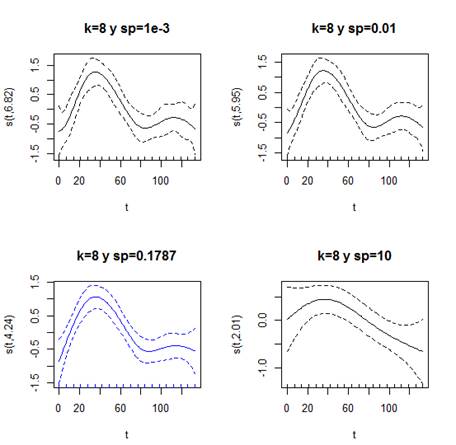
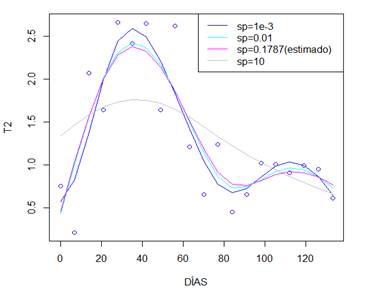
La figura 11, permite comparar los ajustes generados por las variaciones en 𝜆. Las curvas ajustadas no difieren una de la otra en mayor proporción, excepto la curva con un 𝜆=10 que tiende a la linealidad. Aprecie esto de mejor forma en la figura 12.
Resultados de Serie T3
El modelo a partir de los datos sugerido por Lugo (2018) para la serie T3 es:

En la tabla 12, se plasman los resultados obtenidos para los ajustes P splines. El modeloT3 obtuvo el menor BIC mientras que el modelo fitT3.9 con arrojó el menor GCV y AIC y el mayor logLik y R2adj. Así, el mejor modelo para ajustar esta serie queda denotado por fitT3.9. el cual tiene la siguiente forma: fitT3.9<-gam (y ~ s(t,bs="ps",k=9))
Tabla 12 Selección del mejor ajuste P spline para serie T3.
| Modelo | Base | Sp | s(t) | GCV | AIC | BIC | LogLik | R2adj |
|---|---|---|---|---|---|---|---|---|
| fitT3.9 | (y ~ s(t, bs="ps",k=9)) | 0,0074 | 4,57e-07 *** | 2,6909 | 73,982 | 83,047 | -27,887 | 0,856 |
| fitT3.19 | (y ~ s(t,bs="ps",k=19)) | 45,233 | 1,24e-06 *** | 2,8766 | 78,131 | 84,463 | -32,752 | 0,81 |
| fitT3.20 | (y ~ s(t,bs="ps",k=20)) | 57,273 | 1,2e-06 *** | 2,8755 | 78,108 | 84,461 | -32,673 | 0,811 |
| modeloT3 | Ricker | 74,842 | 77,829 | -34,421 | 0,833 |
Elaboración: El autor.
La figura 13, muestra el efecto del suavizado en los datos para los distintos valores de k utilizados para la serie T3. A la izquierda y en azul, el modelo seleccionado como mejor ajuste P spline. Presenta una mayor ondulación. Se aprecia, el efecto del suavizado en las curvas.
Elaboración: El autor
Figura 13. Representación gráfica del efecto del suavizado con IC del 95% y 3 valores de k para la serie T3.
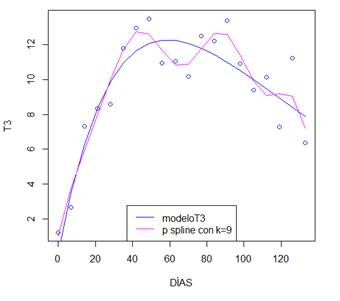
En la figura 14, se pueden cotejar las curvas generadas por el mejor ajuste P splines en la serie T3 y modeloT3. El modelo P spline genera una curva menos lineal.
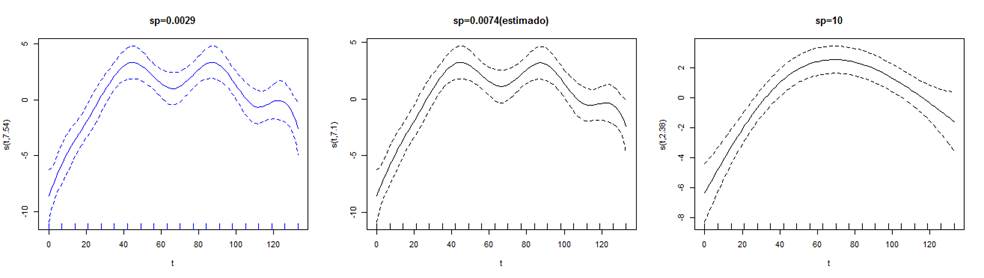
La tabla 13, resume los resultados arrojados para la selección del valor óptimo de λ sobre el mejor ajuste P spline para la serie T3. El modelo fitT3.9a generó el mayor logLik y R2adj, este último valor compartido con el modelo fitT3.9b que a su vez obtuvo el menor AIC. Así mismo, el modelo fitT3.9c arrojó el menor GCV y BIC. Cada uno de los modelos tienen dos criterios de selección a su favor, sin embargo, se considera más relevante el valor del AIC, así se toma como mejor ajuste al modelo denotado por fitT3.9b y su modelo aproximado es: fitT3.9b<-gam (y ~ s(t,bs="ps",k=9,sp=0,0029))
Tabla 13. Selección de sp óptimo para el mejor ajuste P spline en serie T3.
| Modelo | Fórmula | s(t) | GCV | AIC | BIC | LogLik | R2adj |
|---|---|---|---|---|---|---|---|
| fitT3.9ª | (y ~ s (t, bs="ps”, k=9, sp=0,001)) | 6,4e-07 *** | 2,811 | 73,807 | 83,584 | -27,084 | 0,859 |
| fitT3.9b | (y ~ s (t, bs="ps”, k=9, sp=0,0029)) | 5,68e-07 *** | 2,732 | 73,655 | 83,158 | -27,283 | 0,859 |
| fitT3.9c | (y ~ s (t, bs="ps”, k=9, sp=0,0074)) | 5,7e-07 *** | 2,691 | 73,982 | 83,047 | -27,887 | 0,856 |
| fitT3.9d | (y ~ s (t, bs="ps”, k=9, sp=10)) | 1,3e-05 *** | 3,369 | 82,407 | 86,767 | -36,825 | 0,748 |
Elaboración: El autor.
En la figura 15, pueden compararse estos ajuste y a su vez notarse como se comportan las curvas ajustadas cuando 𝜆 tiende a aumentar, el ajuste se alisa más.
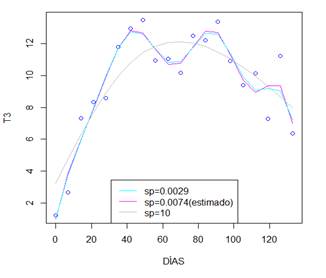
No se aprecia mucha diferencia entre las curvas ajustadas de los modelos fitT3.9b y fitT3.9c. Observe la figura 16 para identificar que el ajuste en las dos curvas es casi idéntico.
CONCLUSIONES
El método P splines representa una herramienta muy útil en el suavizado de curvas en presencia de datos no lineales. En la mayoría de las series analizadas, proporcionó un ajuste satisfactorio, sin embargo, en algunos casos como series Total y T4 que, aunque fueron significativos los ajustes, se consideran mejores modelos los obtenidos por Lino (2017). En la búsqueda de un valor para 𝜆 que optimice el ajuste, se puede confiar en el estimado por la función GAM, ya que proporcionó ajustes casi idénticos a los modelos con un valor de 𝜆 asignado que, de acuerdo con los criterios e índices considerados, fueron seleccionados como modelo final

